









 |
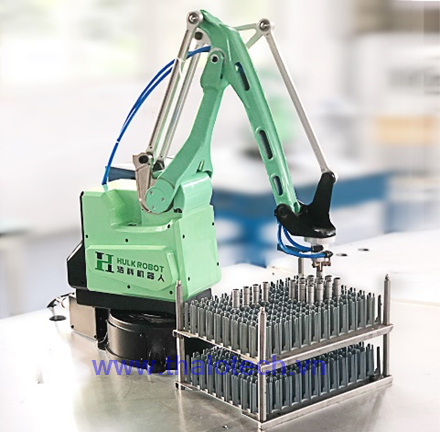
Bộ thực hành Điều khiển Robot công nghiệp 4 trục - Di chuyển sắp xếp linh kiện trong khay Model: TR-CN-HK5404
|
|
|
|
||
 |
Bộ thực hành Điều khiển Robot - ứng dụng Phay gia công Model: TR-CN-02
|
|
|
|
||
 |
Bộ thực hành Điều khiển băng tải và Robot Scara - ứng dụng trong quy trình cân và phân loại sản phẩm tự động Model: TR-CN-MAPS-1
|
|
|
|
||
 |
Bộ thực hành Điều khiển Băng chuyền tự động kết hợp cánh tay Robot cơ bản Model: TR-CN-04
|
|
|
|
||
 |
Bộ thực hành Điều khiển Cánh tay Robot 6 trục Model: TR-CN-05
|
|
|
|
||
|
|
Bộ thực hành Điều khiển Cánh tay Robot Công nghiệp trong dây chuyền sản xuất linh hoạt Model: TR-CN-06
|
|
|
|
||
 |
Bộ thực hành Điều khiển Robot Hàn cỡ nhỏ Model: TR-CN-07 |
|
|
|
||
|
|
Bộ thực hành Điều khiển Cánh tay Robot công nghiệp 6 trục tự do Model: TR-CN-08
|
|
|
|
||
 |
Bộ thực hành Điều khiển Cánh tay Robot Robot công nghiệp – 4 trục Quest Scara Model: TR-CN-MTAB QUEST SCARA là Robot cánh tay 4 trục sử dụng động cơ DC servo làm nguồn động lực chính. Đi kèm theo phần cứng cánh tay robot là phần mềm M-robot cho phép người học mô phỏng và lập trình để ứng dụng vào nhiều mô hình khác nhau. |
|
|
|
||
 |
Bộ thực hành Điều khiển Robot – Parallel Model: TR-CN-RB360 RB 360 là một robot công nghiệp có tốc độ linh hoạt, khả năng tải trọng 3kg, có độ chính xác cao và tích hợp phần mềm theo dõi quan sát. Robot thích hợp ứng dụng trên các băng tải và được lập trình, điều khiển qua phần mềm Flexpicker. |
|
|
|
||
 |
Bộ thực hành Điều khiển Cánh tay Robot phân loại - lắp ráp sản phẩm Model: TR-CN-FEST01 |
|
|
|
||
 |
Bộ thực hành Điều khiển 2 Cánh tay Robot công nghiệp Model: TR-CN-12
|
|
|
|
||
 |
Bộ thực hành Điều khiển Cánh tay Robot 6 trục - Phân loại và gắp sản phẩm Model: TR-CN-13
|
|
|
|
||
 |
Bộ thực hành Điều khiển Cánh tay Robot công nghiệp 6 trục (Education) Model: TR-CN-14
|
|
|
|
||
 |
Bộ thực hành đào tạo Hệ thống sản xuất linh hoạt kết hợp sử dụng Robot công nghiệp Model: TR-CN-15
|
|
|
|
||
 |
Bộ thực hành đào tạo sử dụng Camera Vision điều khiển Robot phân loại sản phẩm Model: TR-CN-VRTS 110 Robot cánh tay 6 trục được lắp trên một băng tải . Robot có thể phân loại, nhận dạng vật thể thông qua các cảm biến và camera được theo dõi qua máy tính. Gồm phần mềm mô phỏng, điều khiển và phần mềm xử lỹ dữ liệu ảnh được gửi về từ robot. |
|
|
|
||
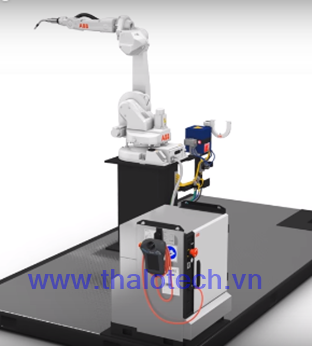 |
Bộ thực hành đào tạo Robot Hàn Model: TR-CN-ABB01
|
|
|
|
||
 |
Bộ thực hành đào tạo Robot painting Model: TR-CN-RB 5500-25
|
|
|
|
||
 |
Bộ thực hành đào tạo Robot Tripod Model: TR-CN-FTTRIP Tripod robot được ứng dụng trên dây chuyền, băng tải có nhiệm vụ sắp xếp, di chuyển các phôi mẫu, vật thể nhẹ vào một vị trí khác. |
|
|
|
||
 |
Hệ thống Robot Hàn Model: TL-R-WELD-1 Mô tả:
|
|
|
|
||
 |
Hệ thống Robot Sơn Model: TL-R-Paint-1 Mô tả:
|
|












