 |
|
Bộ thực hành Điều khiển vị trí 1 trục
Model: TLCDT-101
- Nghiên cứu hệ thống điều khiển vị trí 1 trục
- Thực hành phương thức điều khiển trục chính tuyến tính
- Thực hành điều khiển tay hút phôi bằng khí nén
- Nghiên cứu điều khiển cơ bản và nâng cao động cơ DC, động cơ bước và động cơ servo.
|
|
 |
|
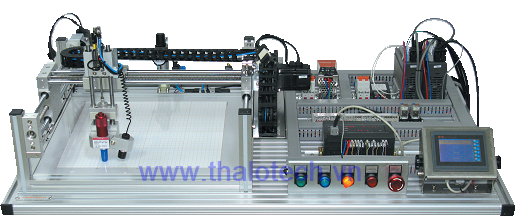
Bộ thực hành Điều khiển vị trí 2 trục
Model: TLCDT-102
- Nghiên cứu hệ thống điều khiển vị trí 2 trục
- Thực hành phương thức điều khiển trục chính tuyến tính
- Thực hành điều khiển tay hút phôi bằng khí nén
- Nghiên cứu điều khiển cơ bản và nâng cao động cơ DC, động cơ bước và động cơ servo.
|
|
 |
|
Bộ thực hành Điều khiển vị trí 3 trục
Model: TLCDT-103
- Nghiên cứu ứng dụng điều khiển bằng khí nén
- Nghiên cứu điều khiển mạch logic
- Nghiên cứu điều khiển mạch tự giữ
- Nghiên cứu điều khiển kiểm soát phương hướng động cơ DC
- Nghiên cứu nguyên lý hoạt động của các sensor khác nhau
- Nghiên cứu điều khiển vị trí và công tắc hành trình
- Nghiên cứu điều khiển cảm biến và các cơ cấu truyền động
- Nghiên cứu điều khiển băng tải
- Nghiên cứu các phương pháp điều khiển lập trình khác nhau.
|
|
 |
|
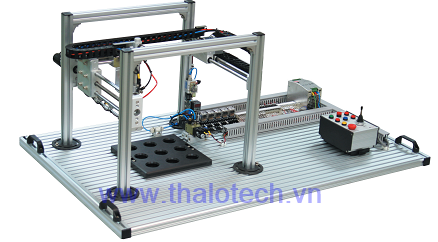
Bộ thực hành Kho hàng tự động
Model: TLCDT-104
- Nghiên cứu cấu trúc hệ thống kho lưu trữ tự động
- Nghiên cứu hệ thống điều khiển 2 trục
- Nghiên cứu điều khiển tín hiệu I/O số
- Nghiên cứu hệ thống điều khiển vị trí
- Nghiên cứu nguyên lý hoạt động động cơ bước
- Nghiên cứu điều khiển định hướng động cơ truyền động bánh răng
- Nghiên cứu điều khiển truyền đọng trục chính
- Nghiên cứu nguyên lý hoạt động của các loại cảm biến khác nhau.
|
|
 |
|
Bộ thực hành Điều khiển Động cơ bước
Model: TLCDT-105
- Nghiên cứu nguyên lý hoạt động của động cơ bước
- Nghiên cứu điều khiển truyền động trục chính
- Nghiên cứu điều khiển vị trí bằng bộ mã hóa xung
- Nghiên cứu điều khiển lập trình theo chuỗi liên tục.
|
|
 |
|
Bộ thực hành Điều khiển truyền động Servo
Model: TLCDT-106
- Nghiên cứu hệ thống điều khiển động cơ servo 2 trục
- Thực hành phương thức điều khiển trục chính tuyến tính
- Thực hành điều khiển truyền động đồ họa với bảng trắng và viết
- Nghiên cứu điều khiển động cơ Servo cơ bản và nâng cao.
|
|
 |
|
Mô hình Điều khiển Thang máy
Model: TLCDT-107
- Cấu trúc cơ khí mô phỏng hệ thống thang máy 3 tầng như ngoài thực tế
- Thực hành điều khiển động cơ bánh răng, hệ thống dây xích và dây cáp
- Thực hành nguyên lý hoạt động thang máy 3 tầng
- Có đèn hiển thị số tầng và nút nhấn lên/xuống
- Kính polycarbonate trong suốt ở mặt trước và mặt sau dễ dàng quan sát chuyển động thang máy
- Thực hành lập trình PLC điều khiển hệ thống
- Có thể kết nối với máy tính.
|
|
 |
|
Mô hình Điều khiển Băng tải 2 tầng
Model: TLCDT-108
- Nghiên cứu hệ thông băng tải tuần hoàn 2 tầng
- Cung cấp hệ thống tự động hóa tổng thể với động cơ, cảm biến, khí nén
- Thực hành điều khiển bộ đệm và kiểm soát tấm nâng với một xi lanh dừng
- Nghiên cứu cảm biến tiệm cận công nghiệp khác nhau
- Thực hành khắc phục lỗi hệ thống
- Thực hành lập trình PLC điều khiển hệ thống
- Có thể kết nối với máy tính.
|
|
 |
|
Mô hình Điều khiển Cửa tự động
Model: TLCDT-109
- Thực hành điều khiển cửa tự động bằng PLC, VLC, vi điều khiển, Rơle
- Thực hành điều khiển bên ngoài với giắc cắm 4mm
- Thực hành điều khiển bên trong với thiết bị đầu cuối
- Thực hành truyền động bằng động cơ bánh răng DC
- Thực hành lập trình PLC điều khiển hệ thống
- Có thể kết nối với máy tính.
|
|
 |
|
Mô hình Điều khiển Quản lý Bãi đỗ xe
Model: TLCDT-110
- Hệ thống điều khiển tuần hoàn
- Mô hình giống với thực tế
- Thực hành điều khiển bằng các phương pháp khác nhau
- Thực hành truyền động bằng động cơ bánh răng DC
- Thực hành lập trình PLC điều khiển hệ thống
- Có thể kết nối với máy tính.
|
|
 |
|
Mô hình Điều khiển Nâng chuyển hàng hóa
Model: TLCDT-111
- Nghiên cứu hệ thống điều khiển 3 trục
- Thực hành truyền động bằng cảm biến
- Thực hành truyền động tuyến tính
- Thực hành lập trình PLC điều khiển hệ thống
- Có thể kết nối với máy tính.
|
|
 |
|
Mô hình Điều khiển Đèn giao thông tự động
Model: TLCDT-112
- Nghiên cứu hệ thống tín hiệu đèn giao thông
- Thực hành lập trình điều khiển thời gian
- Thực hành lập trình tín hiệu đèn qua đường
- Thực hành ứng dụng mạch rơle
- Thực hành lập trình PLC điều khiển hệ thống
- Có thể kết nối với máy tính.
|
|
 |
|
Bộ thực hành Máy Cuốn dây
Model: TLCDT-113
- Nghiên cứu thuật toán và nguyên lý hoạt động của máy cuốn
- Thực hành điều khiển vị trí đa trục
- Thực hành ứng dụng bộ mã hóa
- Thực hành ứng dụng của càm biến tiệm cận
- Thực hành lập trình PLC và VLC điều khiển hệ thống
- Thực hành điều khiển từ xa với Field Bus.
|
|
 |
|
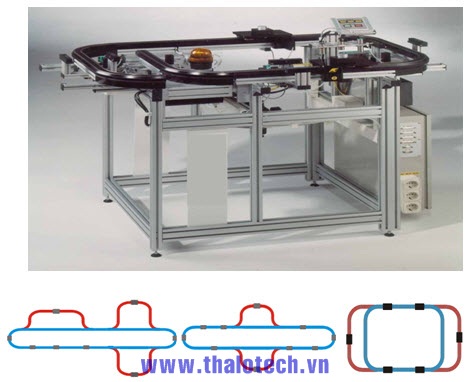
Hệ thống Băng chuyền đa năng với công nghệ Fields-Bus
Model: TLCDT-114
Mô tả:
- Hệ thống băng chuyền gồm bộ khung điều chỉnh được, các khung này được lắp ghép dễ dàng và nhanh chóng.
- Hệ thống băng chuyền có thể lắp ghép với nhiều trạm điều khiển khác nhau.
- Băng vận chuyển dạng vòng có diện tích tuỳ theo yêu cầu cụ thể cho hệ thống linh hoạt.
|
|
 |
|
Trạm Lưu trữ và hồi tiếp phôi nhiên liệu tự động
Model: TLCDT-115
Mô tả:
- Phôi được lưu trữ ở các tầng khác nhau. Thông qua hệ thống tay gắp 3 trục vận chuyển phôi tới các trạm tiếp theo để xử lí.
- Sau quá trình xử lí phôi được gắp trở lại vào trong kho lưu trữ. Các phôi được phân loại theo các đặc tính khác nhau.
- Vị trí lưu trữ phôi được điều khiển bởi các cảm biến.
|
|
 |
|
Trạm Lắp ráp và Tay gắp
Model: TLCDT-116
Mô tả:
- Chi tiết hình khối trụ được xắp xếp chồng lên nhau trong 3 ống chứa và được đẩy ra từ phía dưới ống chứa đặt trên đường băng.
- Hệ thống cánh tay gắp sẽ lấy chi tiết đặt lên thoi đẩy để chuyển tới các trạm gia công tiếp theo.
|
|
 |
|
Trạm Lắp ráp với cánh tay Robot 5 trục
Model: TLCDT-117
Mô tả:
- Phôi được cung cấp từ 3 băng chuyền đến vị trí robot. Cánh tay robot lắp ráp 3 phôi lại với nhau.
- Sản phẩm cuối cùng được Robot vận chuyển đến trạm xử lí tiếp theo.
|
|
 |
|
Trạm Đo lường và Tay gắp
Model: TLCDT-118
Mô tả:
Trạm có chức năng kiểm tra độ dày và vật liệu phôi (nhôm, plastic)
|
|
 |
|
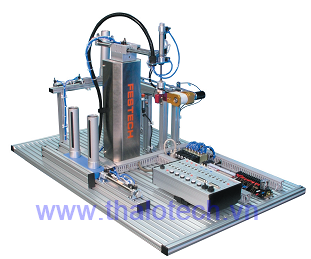
Trạm ép thủy lực và tay gắp
Model: TLCDT-119
Mô tả:
Trạm hoạt động trông qua cơ cấu bánh răng, các chi tiết phôi cần ép hay đục lỗ sẽ được chuyển tới trạm. Khi hoàn tất tác vụ, phôi được chuyển tới trạm xử lý kế tiếp.
|
|
 |
|
Trạm Tiện CNC
Model: TLCDT-120
Mô tả:
Khi phôi được chuyển tới trạm này. Trạm sẽ tiện chi tiết theo lập trình người dùng cài đặt.
|
|
 |
|
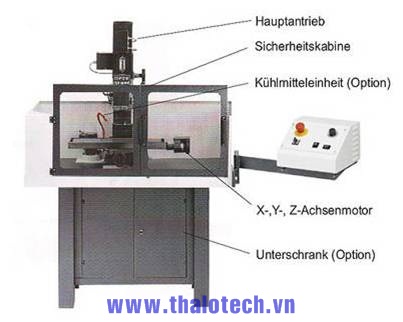
Trạm Phay CNC
Model: TLCDT-121
Nhiệm vụ:
Khi phôi được chuyển tới trạm này. Trạm sẽ phay chi tiết theo chương trình người dùng cài đặt.
|
| |
|
|
 |
|
Trạm Vận chuyển với cánh tay Robot
Model: TLCDT-122
- Cánh tay Robot 6 trục
- Trạm trung chuyển có nhiệm vụ cung cấp phôi cho máy phay – tiện gia công
- Phôi sau khi gia công được Robot chuyển tới trạm xử lý kế tiếp.
|
|
 |
|
Trạm Kiểm tra với Camera số
Model: TLCDT-123
Nhiệm vụ :
Các chi tiết đưa tới trạm, thông qua camera số sẽ lấy hình ảnh bề mặt các chi tiết khác nhau . Sau đó hệ thống sẽ phân tích, so sánh chúng với mẫu chuẩn đã được cài đặt vào trong hệ thống.
|
|
 |
|
Trạm Đo lường QA với tiêu chuẩn ISO
Model: TLCDT-124
Mô tả:
- Đo lường và đánh giá các chi tiết sau gia công với các công cụ đo lường số.
- Đo lường và truyền tín hiệu về phần mềm trên máy tính. Phần mềm đánh giá chi tiết.
|
|
 |
|
Trạm giám sát và điểu khiển
Model: TLCDT-125
- Trong nhà máy kĩ thuật, các hệ thống luôn luôn khởi động và giám sát thông qua trạm điều khiển.
- Có thể kết nối với hệ thống lập trình mô phỏng và kết nối tới phần cứng PLC.
- Dữ liệu có thể truyền đi, hoặc viết vào online khi kết nối với PLC tại trạm điều khiển.
- Người điều khiển có thể giám sát liên tục về tình trạng nhà máy.
|
|
 |
|
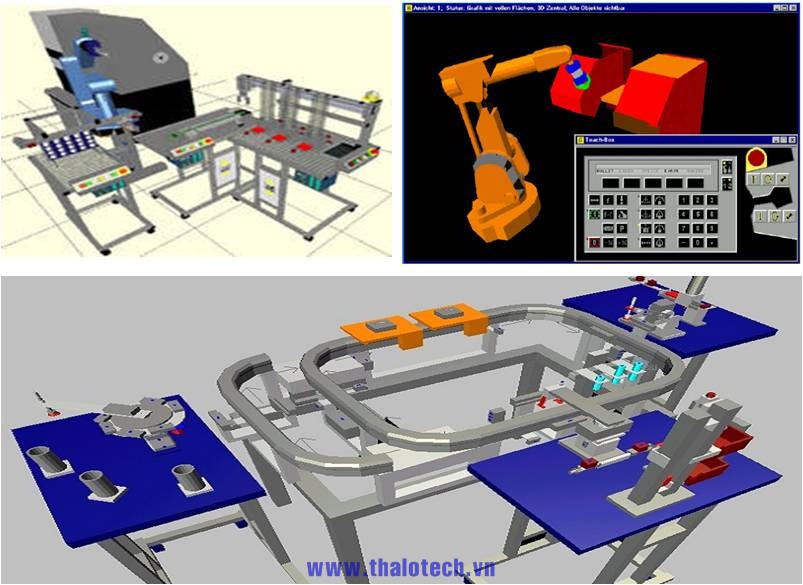
Phần mềm Lập trình - Mô phỏng
Model: TLCDT-126
- Tạo và thiết lập cấu hình cho các thiết bị Điện, Điện Tử, Điện Khí Nén, Các cơ cấu truyến động, Bộ Điều khiển
- Mô phỏng, kiểm tra và lập trình PLC trên phần mềm.
- Đồ họa 3D và có thể mô phỏng các quy trình hệ thống mà không cần phần cứng thật.
- Thư viện phần mềm phong phú giúp người sử dụng thuận tiện thiết lập cấu hình hệ thống
- Phần mềm tích hợp mô phỏng lập trình – hoạt động Robot
- Kết nối PLC thực tế bên ngoài để vận hành và giám sát.
|
|
 |
|
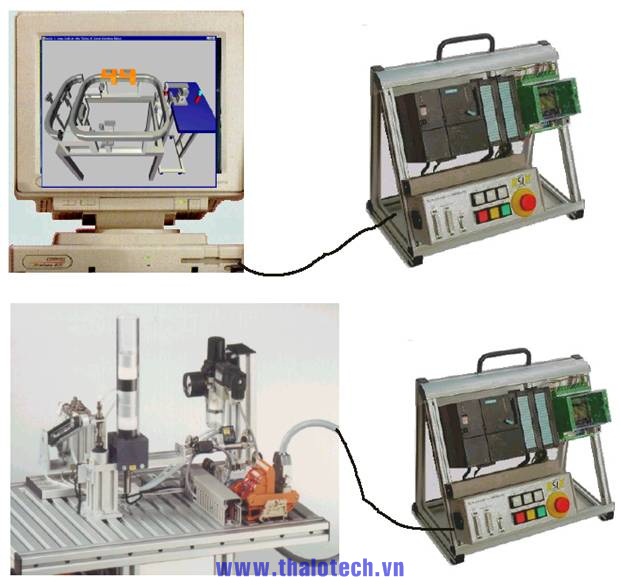
Module kết nối
Model: TLCDT-127
- Dùng kết nối với phần mềm mô phỏng chạy thử kiểm tra
- Dùng kết nối tới các trạm để vận hành hệ thống trong thực tế
- Các module kết nối với nhau thông qua mạng Profibus.
|
| |
|
|
| |
|
|















