 |
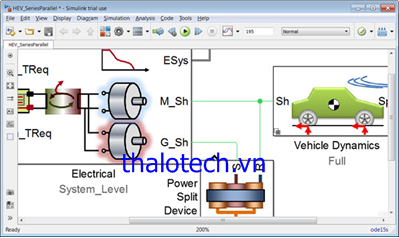
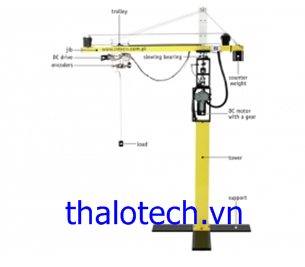
Bộ thí nghiệm cẩu treo 3 trục
Model: TLTDH-205
Mô tả:
- Mô hình cẩu treo giống với thực tế
- Nghiên cứu nguyên lý hoạt động và cấu tạo của cẩu treo
- Thí nghiệm điều khiển bằng phương pháp PID
- Thí nghiệm điều khiển phản hồi sử dụng LQR
- Thí nghiệm điều khiển trạng thái phản hồi
- Thí nghiệm điều chỉnh tham số
- Tương thích Matlab/Simulink
|
|
 |
Bộ thí nghiệm tự nâng của từ trường
Model: TLTDH-206
Mô tả:
- Hệ thống điều khiển điện từ không ma sát
- Thí nghiệm điều khiển lực nâng của từ trường với các phương pháp điều khiển phi tuyến, open loop, điều khiển không ma sát và điều khiển hệ thống động
- Phương thức thí nghiệm của hệ thống là sử dụng nam châm nâng cục sắt hình cầu và điều khiển cục sắt theo quỹ đạo mong muốn. . Vị trí đối tượng được xác định thông qua một cảm biến.
- Tương thích phần mềm Matlab/Simulink mô phỏng, lập trình điều khiển, đo dòng điện cuộn dây, giám sát chuyển động, vẽ đồ thị,…
|
|
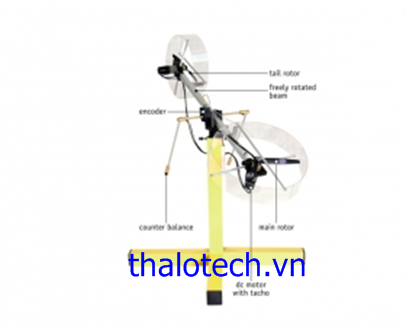 |
Bộ thí nghiệm mô hình trực thăng 2 cánh quạt
Model: TLTDH-207
Mô tả:
- Hệ thống điều khiển chéo đa đầu vào đa đầu ra (MIMO) mạnh mẽ
- Hệ thống Khí động học hai Rotor là hệ thống được thiết lập cho các thí nghiệm điều khiển. Ở một số khía cạnh nhất định, hoạt động của nó mô phỏng trực thăng hai cánh quạt. Thiết bị thể hiện một hệ thống phi tuyến bậc cao với các khớp nối chéo đáng kể.
- Hệ thống được thiết kế để hoạt động với một bộ điều khiển bên ngoài dựa trên PC. Máy tính điều khiển giao tiếp với vị trí, cảm biến tốc độ và động cơ bằng bộ điều khiển chuyên dụng và giao diện nguồn.
- Tương thích phần mềm Matlab/Simulink mô phỏng, lập trình điều khiển, đo dòng điện cuộn dây, giám sát chuyển động, vẽ đồ thị,...
|
|
 |
Bộ thí nghiệm cân bằng bóng trên mặt phẳng
Model: TLTDH-208
Mô tả:
- Nghiên cứu kiểm soát chuyển động của bóng bằng cảm biến cảm ứng
- Nghiên cứu cấu tạo, cơ chế hoạt động của bàn cân bằng bóng
- Thí nghiệm điều khiển tuyến tính
- Thí nghiệm điều khiển PID
- Thí nghiệm điều khiển nhiều vòng lặp
- Thí nghiệm logic mờ
- Thí nghiệm điều khiển bằng PWM
- Kết nối máy tính thông qua giao tiếp USB
|
|
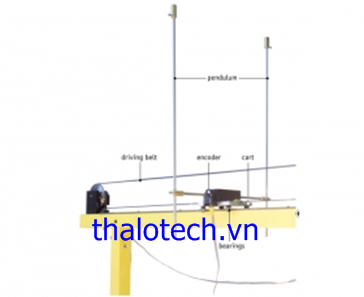 |
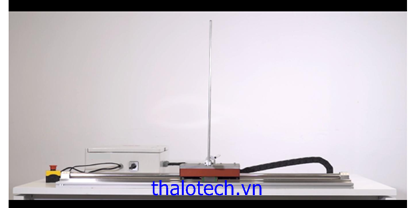
Bộ thí nghiệm nghiên cứu con lắc ngược kép linh hoạt điều khiển chuyển động tuyến tính
Model: TLTDH-209
Mô tả:
- Hệ thống điều khiển thời gian thực bậc 4, phi tuyến và không ổn định
- Hệ thống Con lắc & thiết bị chuyển động tuyến tính bao gồm một cực được gắn trên một thiết bị đẩy theo cách mà cực chỉ có thể lắc lư tự do trong mặt phẳng thẳng đứng. Thiết bị đẩy được điều khiển bằng động cơ DC. Để đu và giữ thăng bằng cho cột, thiết bị đẩy qua lại trên một thanh ray có chiều dài hạn chế
- Hệ thống hoạt động trực tiếp trong môi trường MATLAB / Simulink. Người dùng có được các thử nghiệm được lập trình trước sẵn sàng trong thời gian thực bằng cách sử dụng hộp công cụ
|
|
 |
Bộ thí nghiệm điều khiển thăng bằng 6 trục
Model: TLTDH-210
Mô tả:
- Thí nghiệm điều khiển vị trí thông qua 6 trục
- Thí nghiệm điều khiển các động cơ DC gắn với mỗi chân máy
- Thí nghiệm điều khiển tuyến tính
- Giao tiếp máy tính thông qua USB
- Tương thích Matlab/Simulink/Labview
|
|
 |
Bộ thí nghiệm điều khiển cánh tay robot 6 trục
Model: TLTDH-211
Mô tả:
- Thí nghiệm điều khiển cánh tay robot với mô hình điều khiển của hệ thống công nghiệp
- Thí nghiệm điều khiển vị trí, tốc độ cánh tay
- Đo vị trí và góc của trục robot thông qua phần mềm máy tính
- Kết nối máy tính thông qua giao tiếp USB
- Tương thích Matlab/Simulink/Labview
|
|